
Introduction
The orthodontic field has worked to enhance the effectiveness of orthodontic appliances through advancements in appliance design, since its establishment orthodontic therapy has become simpler for clinicians. An obvious progression of this effort to increase the effectiveness of clinical laboratory processes is because of the employment of robotic technology in Orthodontics.1
In 1950 in science fiction novel “I Robot” author Isaac Asimov coined the term “ROBOTICS”. The Czech playwright Karel Capek first used the word “ROBOT” in his 1921 play “ROSSOM’S UNIVERSAL ROBOTS”. Robotics is the field of technology that deals with the design, manufacture and operation of robots. It derives from the Czech term “ROBOTA” which means forced labour.2 It includes computer systems for their control, sensory feedback and the data processing units.
According to the Robot Institute of America, a robot is defined as “A reprogrammable multifunctional manipulator designed to move materials, parts, tools or specialized devices through various programmed motions for a performance of variety of tasks (1979).”2
Since 1990s, robot use has gradually expanded from traditional industrial sectors to the medical industry. In developed nations like United Nations, Italy and Japan the government and Academia began to focus on the development of the medical robot systems and deployed a lot of manpower and financial resources on the research field. The first international symposium on Medical robotics and Computer Assisted Surgery was held in Pittsburgh, Pennsylvania, USA, in 1994. 3
The Rancho arm was developed as a robotic arm to help handicapped parents at the Rancho Los Amigos Hospital in Downey, California. This computer controlled arm was bought by Stanford University in 1963.4 In 1985 a robot PUMA 560 was used to place a needle for a brain biopsy using CT guidance. In 1988 the PROBOT developed at Imperial College London, was used to perform the prostatic surgery. The cyber knife had been invented by John R Adler and the first system was installed at Stanford University in 1991 which is now used to treat patients with brain and spine tumors. In this an X-ray camera tracks displacement and compensates for motion caused by breathing. This radiosurgery system integrated image guided surgery and robotic positioning. “ROBODOC” was introduced in 19923 from integrated surgical system to mill out precise fittings in the femur for hip replacement. In 1994 one of the most successful robot assisted surgery appliances was cleared by the FDA.5
In 2019, engineers at the University of Pennsylvania created millions of nano robots in just few weeks using technology borrowed from semiconductors. In future these microscopic robots small enough to be hypodermically injected into the human body and controlled wirelessly, will deliver medications and perform surgeries, revolutionizing medicine and health.6
The effectiveness of robotic appliances has increased because of advances in three-dimensional imaging and manufacturing technique. The development of patient-specific products like the Insignia® system and Suresmile®, which produce an interactive treatment plan and bespoke appliances, is a result of technological advancements of robotics in medical field.1
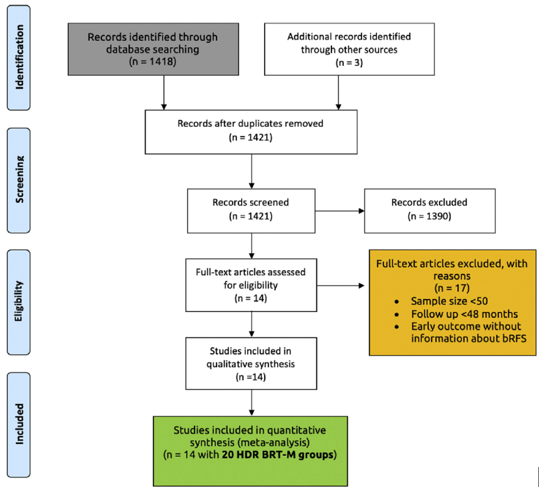
Following the PRISMA, principles of systematic evaluation was conducted [Figure 1]. This study was conducted to provide a comprehensive overview of all robotic related advancements in Orthodontics. GOOGLE SCHOLAR, PUBMED and MEDLINE were used to compile the database. The search for relevant publications was restricted to the period 2000 to 2020.
After deleting duplicate records from the original database, 99 total search results were finalized. Out of which 81 were found and 59 articles were fit for our study which were included in the review. The exclusive usage of the keyword search “Robotics in Orthodontics” has been discussed below in full based on the content retrieved.
Applications
Need for robotics in dentistry increased with the need for precise arch wires and top-notch dentures. Orthodontic arch wire bending is a crucial component of fixed orthodontic therapy, where in elasticity of the arch wire and the complexity of the old arch wire’s shape and the unpredictability of manual operation necessitate an experienced orthodontist for arch wire bending. The robotic dentistry can provide more effective and precise treatment with high-quality arch wire bending in a shorter duration. Robotic applications will improve orthodontist job and emphasize the significance of careful planning of orthodontic cases, changing people’s dental health and making it more safer. 7
Archwire Bending
Bending art system (BAS)
The Bending Art System (BAS), first computer aided technology for the automatic bending of orthodontic individual arch wires, was created in early 1990s. 8 The goal was to develop a computer supported system that can bend arch wires individually for each patient, which can be used with all edgewise brackets on the buccal or lingual side, for all slots. 8
Three elements make up The Bending Art System: A Wire Bending Unit, Stereoscopic Internal Camera and A Computer Program (Figure 2). Extremely accurate and precise individual arch wires can be produced using first, second and third order bends. Using a stereoscopic Charged Couple Device (CCD) camera, the geometric data pertaining to 3D position of the brackets has registered intra-orally. 9 The upper and lower dental arches resulting occlusal scans are then shown on the computer screen for treatment planning and arch wire design. The computer program automatically measures the angulations, torque and rotation of each bracket slot and then limits them.
Force Module was added to BAS software to prevent overloading after Prof. Dr. Helge Fischer Brandies in 1998 noted that it is difficult to correctly estimate the forces operating on individual teeth.10
Lamda robotic wire bending system
Customized arch wires are required during lingual orthodontic treatment. Earlier these arch wires were bent manually by skilled orthodontists only, which needed extra chairside time and specialized skills, still it could not guarantee the appliance accuracy. A unique robotic system was created for automatic and precise preparation. 11
Alfred gilbert introduced the LAMDA software in 2011 for more quick and accurate construction and bending of arch wires (Lingual arch wire manufacturing and design aid). The research and development team of smile center dental specialties in Mexico city used the Microsoft visual studio 2008 to express integrated development environment and the visual c# programming language to create this software. The wire bending robot is intended to be used in-house, either prior to or following the bonding of brackets, eliminating the need for an external laboratory and the associated costs, as well as the time spent waiting for wires to be shipped. 12 This robot only completes the first order, other two dimensions are handled by the well-known Hiro Bonding System given by T. Hiro in 2008.13
Lingual arch wire design using lamda
Digital occlusal picture of study cast is loaded into the LAMDA software for fabrication of arch wire for a patient without braces. Starting with pointer at wire’s one distal end, the pointer is run continuously around the arch, clicking where each bend is required. Robots bend the arch wire into the needed shape. Similar protocol is followed for patient with brackets already bonded, but single occlusal photograph is used instead of a photograph of a plaster cast.
Occlusal photograph is taken at each appointment, so that LAMDA can be used to determine the design and size of next arch wire. 13
The wire bending robot
Gantry robots, also known as “Cartesian coordinate robots” 14 have linear axis of control that are at right angles to one another and are able to move an effector end in multiple planes of space with extreme precision in the LAMDA system. Because the LAMDA robot operates only on X and Y axis, it is relatively simple, small and affordable to produce. 13
NiTi arch wire can be bent without losing its ability to change reversibly between the austenitic and martensitic phases because of integrated heater that raises the temperature of wire to 600 degrees Fahrenheit.
Since this robot provides first order bending only, necessity for second and third order bending emphasized on using Hiro Bracket placement system, which lowers the cost of the device and gives the orthodontist greater control over the process than in systems that are outsourced. 13

Lambda 2
The four-engine robot (LAMBDA 1) was rendered obsolete when the straight arch approach became popular in lingual orthodontics as the arch did not require correction between canine and premolar and between first and second molars. Twelve motors on the Lamdabot 2 allow it to bend from one first molar to the first molar on opposite side. This robot allows the manipulation of a straight arch wire (without segmentation) or a preformed wire, promoting the bends required to obtain the segmented orthodontic arch wire. Similar to LAMBDA, this robot permits customization of orthodontic arch wires. 15
Physical robotic system
In 2016, Zeyang Xia, Hao Deng, Shaokui Weng,Yangzhou Gan, Jing Xiongl and Hesheng Wang did a study and developed a novel arch wire bending robotic system and a comprehensive bending control system to resolve the critical difficulties in clinical preparation and the existing issues of current automatic bending system.
Their study describes
The hardware implementation of Physical Robotic System.
The software architecture design of ROS-Integrated Control System.
The Parameterization method of customized arch wire.
The proposed sampling- based Bending Planner and collision checker in time varying environment.
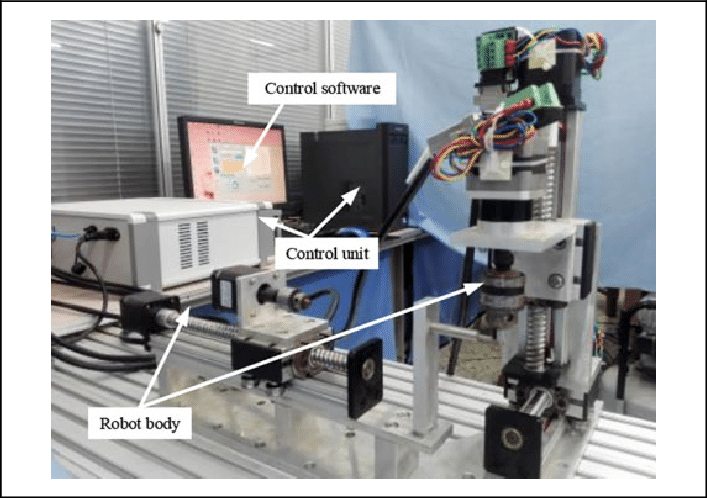
Design comprised of:
System Mechanism Design: Two execution units, the manipulation unit and the gripping unit are able to perform bending operation concurrently. Manipulating unit is mounted to the end flange of a 6-DOF robotic arm 16 and the Gripping unit is fixed on a base. 17
Bending Gripper Configuration: When using a straight arch approach for automatic bending, a successful gripper mechanism is essential for preparing the arch wire. The end-pliers may be controlled with precise position feedback to the Maxon- EPOS2 24/2 motor driver. For additional bending control, a 6-axis force/ torque sensor is installed on edge flange of the grippers to measure the bending force. 11
Ethernet based communication: Communication framework was designed as two categories, a centralized control system and distributed hardware I/O nodes. The centralized control system runs Robot Operating System (ROS) which includes Robot arm, motors, sensors, DERH controller and other hardware units are all abstracted as hardware I/O nodes.
Sure smile system18
The process begins with the orthodontist capturing digital photographs of mouth and teeth using a CBCT or a white light scanner and only teeth are adjusted into the proper alignment. A computer receives the 3D image data for further processing. 18
The dentist provides position and required tension for the brackets and wire into the computer, and convey via the internet to the SureSmile office. Two robotic pliers grab an orthodontic wire and bend and twist it into a pattern that will move the teeth into their desired position. 18
The accuracy of the system is as follows:-
Automated system for appliance fabrication
In 1995, Sassani F Roberts reported an automated appliance fabrication setup process. The system incorporates machine vision, a robotic manipulator (a computer-controlled platform and gantry) and process planning and collision avoidance software for the moving parts of the system. 19
The machine vision system consisting of a laser, rotating mirrors, CCD (charge coupled device) camera and image frame grabber, is used to map the surface of the dental cast to generate a three-dimensional computer model.
The acrylic deposition and curing system, incorporating a peristaltic pump and an ultraviolet lamp, is used to apply and cure the acrylic on the surface of the dental cast.
Three-dimensional mapping of the dental cast is performed by projecting a thin plane of laser light on the dental cast and analyzing the incident light with a computer vision system. Through an iterative process of changing the orientation of the cast and the elevation of the laser line, a full surface model of the cast is acquired.
Elevation data from the three-dimensional surface model are used to determine the pump and lamp position and the orientation of the dental cast during the deposition and curing of the acrylic. The result is a smooth acrylic base having the appropriate contours and thickness, requiring only minimal trimming and polishing.
Machine motion, appliance attitude, acrylic flow rate, and ultraviolet light exposure time are regulated to obtain accurate acrylic deposition and to ensure that the liquid does not flow out of the desired shape before it solidifies.
The machine performs all appliance manufacturing steps except the bending and positioning of retaining wires and expansion screws onto the dental cast.
Invisalign
The modern aesthetic orthodontic treatment procedure known as clear aligners was created especially for individuals who are extremely self-conscious about their appearance with appliance during treatment. 20 A series of virtually invisible, transparent, thin, custom-made plastic aligners called Invisalign are used to properly reposition teeth. Align Technology Inc. launched Invisalign in the late 1990s, with the modern technology this kind of therapy is now much easier to administer. Align Technology uses stereolithography technology to create its reference models. Polyvinylsiloxane impressions and bite registration are converted into dimensionally accurate 3-D electronic study models using CT scanning as radiographs which are converted to images called sinograms, which represent the data from the horizontal line of the detector as the part rotates. CPU fiber optically linked computer cluster uses sinograms and algorithms to create 116microns thick reconstruction slice of object. These slice are stacked electronically to form raw electronic study model. Maxillay model is registered to mandibular model electronically in centeric occlusion. The raw electronic models are "detailed" by using software that simulates standard dental lab procedures, such as bubble removal, void filling, and gingival-line definition. 20 The teeth are then electronically separated with an algorithm that recognizes inter proximal embrasures and gingival lines around each tooth. There resin models formed are loaded into automated aligner forming system that heats, forms laser marks sheet plastic over each plastic model. Automation helps trimming of aligners in 30 seconds. Automation means that appliances can be made very quickly in a repeatable, consistent manner for example in case of lost or broken aligner.
Future Research
Although there has been progress, in the research of the application of robots in prosthodontics and Orthodontics, but it is not complete. Viewing from the state of the art of application of robot in prosthodontics and orthodontics and the market demand of oral cavity repair, the following research aspects should be done in the future. 21
Novel structure
The robot and Orthodontist needs to be highly flexible, reliable and accurate because of restricted work space in oral cavity. Reducing the robots degree of freedom is required in order to satisfy the oral cavity repair the requirements for the structural design of the robot are satisfied by combining the high accuracy and simplified mechanical structure performance of the parallel robot with the flexibility operation of the serial robot using to do a relation in structure and property of the serial robot and parallel parallel robot.21
Sensor and control technique
Future research for robotic arch wire bender used in orthodontic will concentrate on the spring back and bending algorithms. Future research on robots for dental implantology will concentrate on real-time acquisition and feedback of drilling depth and implant forces, as well as registration between intraoperative navigation images and pre-operative reconstruction images.21
Human computer interaction technology
One of the essential technologies for controlling the robot’s mobility in Orthodontics is human-computer interface technology.22 Future research on the robotic orthodontic arch wire bender will concentrate on three-dimensional virtual presentation of a design personalized orthodontic arch wire on the screen, a virtual observation environment, and the interactive adjustment of the various loops. A form of amiable human-computer interface software should be created to facilitate the operation and give the operators humanization input and feedback. 21
In vitro studies using human robotic system
Dry human skull was examined by USUI et al. 23 in 2004 for patterns of strain in 15 different locations of the lateral and medial surfaces of the jaw. A human robotic device that represented each of the eight bilateral muscles connected with the DC servomotor coupled to a wire and pulley, which was used to simulate the strains. Masseter, Medial pterygoid, anterior temporalis and posterior temporalis muscles were mimicked and their tractions were increased from 1X to 4X, each reflecting a distinct amount of traction or force (5,3 and 4N respectively). 24
Conclusion
In the modern world Orthodontics is a fast expanding specialty, when comfort, aesthetics and the need to expedite the treatment process successfully are crucial considerations. Therefore, Robotics has a significant chance of becoming a common occurrence in the near future at orthodontic practices.
Although surgical robots have been in experimental usage since the early 1920s; nevertheless the lack of precision kept them at bay and nonetheless with the inclusion of renowned artificial intelligence in orthodontics, it could transform everything.
The utilization of robotic technology in Orthodontics is systematically summarized in this work.